实际建设内容、技术路线¶
实际建设内容¶
技术路线¶
软件架构¶
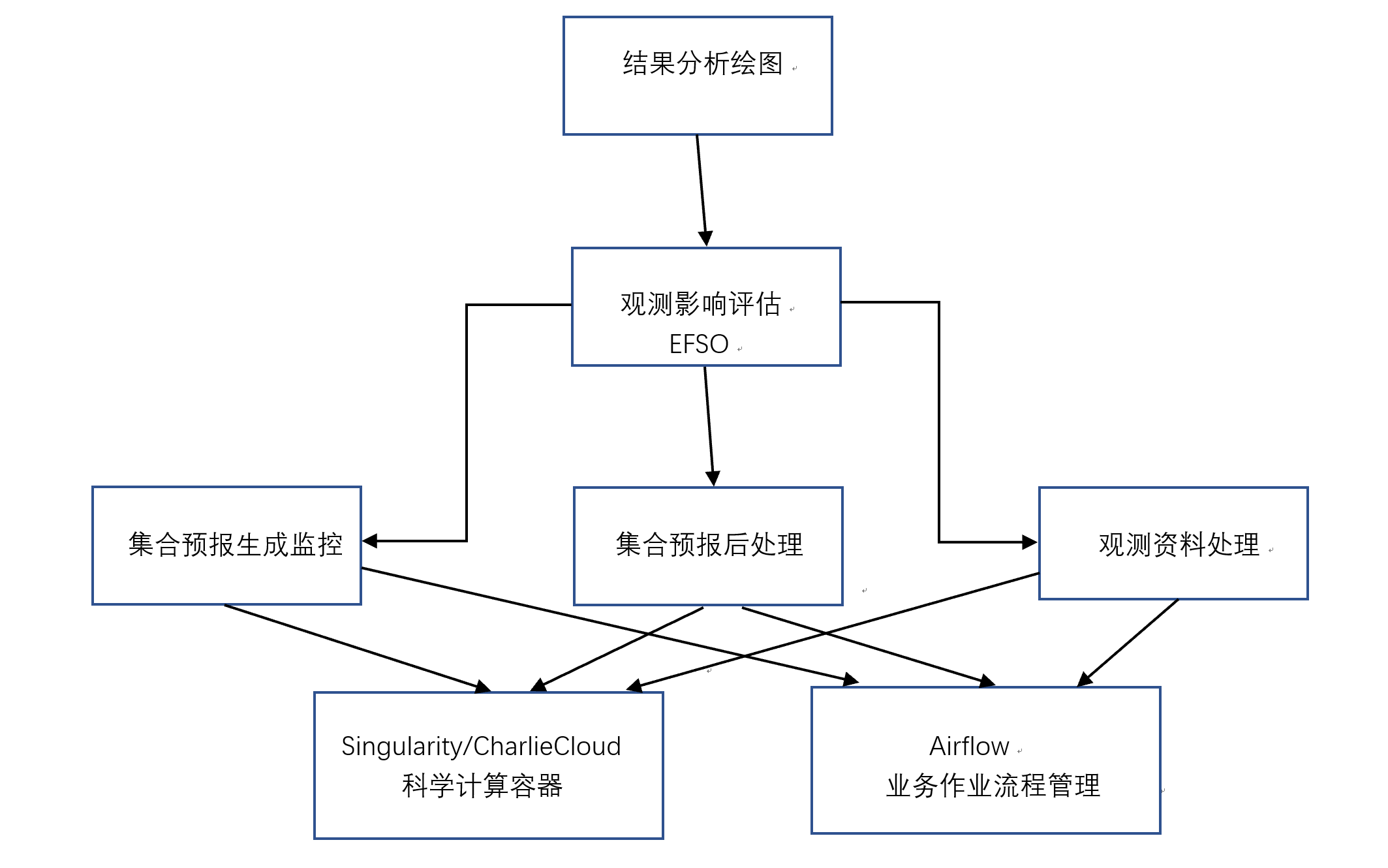
efso软件架构
理论依据¶
FSO是评估预报误差对观测敏感性的一种分析方法。它不但可以评估观测系统中具体组成部分(如探空观测系统,地面观测系统)对改进预报技巧的有效性,而且能够定量给出各观测变量(如风场,温度)在当前预报中的相对影响,同时给出这种影响的空间分布。FSO应用的一个重要假设为观测作用可以线性分解与叠加的,即预报误差中的主要部分是可以用非线性模式的切线性模式或是一组集合预报非线性扰动的线性组合表示。
目前,FSO方法的实现上主要有两种方式:
- 基于伴随模式的敏感性分析方案;
- 基于集合预报的敏感性分析方案。两种方案的数学原理是一致的,主要不同之处实践过程中如何描述扰动的线性演变与同化分析过程中增益矩阵的处理。
FSO的数学原理简要描述如下(Baker,2000)。在一个循环资料同化预报系统中,当前分析时刻的分析场一般由前一个时刻分析场产生的短时预报场经过当前观测修正而得到。令 \(x_a\) 表示分析时刻 \(t=0\) 的分析场,而 \(x_b\) 表示前一个同化预报循环产生的短期预报背景场。则观测对分析的影响可以表示为:
(1)¶\[x_a = x_b + \mathrm{K} \delta y \; ;\; \delta y = y - H(x_b)\]式 (1) 中 \(x_a\) 为分析场,\(x_b\) 为背景场,\(y\) 为观测值,\(\mathrm{K}\) 为 Kalman 增益矩阵,\(H\) 为观测算子,\(\delta y\) 为更新变量。从 (1) 可以推导出分析场对观测和背景场的敏感梯度可写为:
(2)¶\[\frac{\partial x_a}{\partial y} = \mathrm{K}^\intercal \; ; \; \frac{\partial x_a}{\partial x_b} = \mathbf{I} - \mathrm{H}^\intercal \mathrm{K}^\intercal \; ; \; \mathrm{H} = \frac{\partial x_a}{\partial x_b}\]式 (2) 中 \(\mathrm{H}\) 为切线性观测算子,上标 \(\intercal\) 代表矩阵转置,\(\mathrm{K}^\intercal\) 代表了同化系统的伴随系统。
考虑一个预报,其预报方程可以写为:
(3)¶\[x^f = M(x^0)\]式 (3) 中 \(x^f\) 为模式预报场,\(x^0\) 为模式初始场,\(M\) 为非线性数值预报模式。
定义在某时刻的一个模式预报误差函数:
(4)¶\[J = \frac{1}{2} ( x^f - x^t )^\intercal \mathrm{C} ( x^f - x^t )\]式 (4) 中,\(\mathrm{C}\) 为权重矩阵,一般为对角矩阵。从 (4) 中可以推导出预报误差函数 \(J\) 对初始场(如果经过了同化分析,初始场就是同化系统中的分析场,\(x^0\) 即为 \(x_a\) )的敏感性梯度:
(5)¶\[\frac{\partial J}{\partial x_a} = \frac{\partial x^f}{\partial x_a} \mathrm{C} ( x^f - x^t ) = \frac{\partial M(x_a)}{\partial x_a} \mathrm{C} ( x^f - x^t ) = \mathrm{M}^\intercal \mathrm{C} ( x^f - x^t )\]式 (5) 中 \(x^t\) 为真值,\(\mathrm{M}\) 为非线性模式的切线性模式,\(\mathrm{M}^\intercal\) 为 \(\mathrm{M}\) 模式的伴随模式。联合式 (1),(4), (5) 可推导出模式预报误差函数 \(J\) 对观测的敏感梯度:
(6)¶\[\frac{\partial J}{\partial y} = \frac{\partial x_a}{\partial y} \frac{\partial J}{\partial x_a} = \mathrm{K}^\intercal \frac{\partial J}{\partial x_a} = \mathrm{K}^\intercal \mathrm{M}^\intercal \mathrm{C} ( x^f - x^t )\]因此,从式中可以看到,预报误差对观测的敏感性梯度需要计算模式的伴随和同化系统的伴随。在同化系统中,观测资料对预报误差的贡献(Observation impacts)一级近似为:
(7)¶\[\delta J = \langle \frac{\partial J}{\partial y}\, , \delta y \rangle = \langle \mathrm{K}^\intercal \frac{\partial J}{\partial x_a }\, , y - H(x_b) \rangle= \langle \frac{\partial J}{\partial x_a} \, , \mathrm{K} ( y - H(x_b)) \rangle = \langle \frac{\partial J}{\partial x_a} \, , \delta x_a \rangle\]式 (7) 中,\(\langle \, , \rangle\) 为内积算符。
由式 (7) 可知,观测对于预报的影响可以解释为:\(\delta y = y- H(x_b)\) 在预报误差对于观测敏感性梯度上的投影;或是,分析增量在预报对于初值的敏感性的投影。从式 (7) 可以看出,当误差改变为负值时,预报误差减少,同化观测提高预报能力;当 \(\delta e\) 为正值时,预报误差增大,同化观测降低预报能力。具体实现上,在四维变分同化系统中,可以利用既有的伴随模式及隐式求解增益矩阵 来评估分析增量及每种观测的对于预报误差的贡献。
在实际的同化系统中,同化资料后主要考察在背景场的基础上同化资料对预报误差的贡献。由背景场作为初始场的预报误差和分析场作为初始场的预报误差分别为:
定义 \(e_a\) 和 \(e_b\) 的差为:
(10)¶\[\delta e = e_a - e_b\]所以
(13)¶\[\delta e = \langle \frac{\partial e_a}{\partial x_a^f} , (x_a^f - x^t) \rangle - \langle \frac{\partial e_b}{\partial x_b^f} , (x_b^f - x^t) \rangle\](14)¶\[\delta e = \langle (x_a^f - x_b^f) , \frac{\partial e_a}{\partial x_a^f} + \frac{\partial e_b}{\partial x_b^f} \rangle = \langle (x_a - x_b) , \frac{\partial e_a}{\partial x_a} + \frac{\partial e_b}{\partial x_b} \rangle\]式 (14) 利用式 (5) \(x_a^f-x_b^f\) 可以近似展开 (15) 可以推导出右边的表达式
(15)¶\[x_a^f - x_b^f = \mathrm{M}_b^\intercal (x_a -x_b) = \mathrm{M}_a^\intercal (x_a - x_b)\]因此采用不同的近似,(14) 有不同的表达形式。Gelaro等(2007)给出了5种不同的表达形式:
(16)¶\[\delta e_1 = 2(x_a - x_b^\intercal \mathrm{M}_b^\intercal \mathrm{C} (x_a^f - x^t)\](17)¶\[\delta e_2 = (x_a - x_b)^\intercal [\mathrm{M}_b^\intercal \mathrm{C} (x_a^f - x^t) + \mathrm{M}_a^\intercal \mathrm{C} (x_b^f - x^t)]\](18)¶\[\delta e_3 = (x_a - x_b)^\intercal [\mathrm{M}_b^\intercal \mathrm{C} (x_b^f - x^t) + \mathrm{M}_a^\intercal \mathrm{C} (x_a^f - x^t)]\](19)¶\[\delta e_4 = (x_a - x_b)^\intercal [\mathrm{M}_a^\intercal \mathrm{C} (x_a^f - x^t) + \mathrm{M}_a^\intercal \mathrm{C} (x_b^f - x^t)]\](20)¶\[\delta e_5 = (x_a - x_b)^\intercal [\mathrm{M}_b^\intercal \mathrm{C} (x_b^f - x^t) + \mathrm{M}_b^\intercal \mathrm{C} (x_a^f - x^t)]\](21)¶\[\delta e_1 = 2 \delta y^\intercal \mathrm{K}^\intercal \mathrm{M}_b^\intercal \mathrm{C} (x_a^f - x^t)\]基于集合的FSO,关键在于利用一组集合扰动的线性组合来近似表示扰动的时间演变,进而省略非线性模式的切线性与伴随模式。在集合预报系统中,已知分析扰动与预报扰动的前提下,式 (6) - (7) 中,增益矩阵及线性模式与增益矩阵的组合可以表示为 (Kalnay 等,2012):
(22)¶\[\mathrm{K} = \frac{1}{K-1} \mathrm{X}_0^a {\mathrm{X}_0^a}^\intercal \mathrm{H}^\intercal \mathrm{R}^{-1}\](23)¶\[\mathrm{M} \mathrm{K} = \frac{1}{K-1} \mathrm{M} \mathrm{X}_0^a {\mathrm{X}_0^a}^\intercal \mathrm{H}^\intercal \mathrm{R}^{-1} \approx \frac{1}{K-1} \mathrm{X}_{t|0}^f {\mathrm{Y}_0^a}^\intercal \mathrm{R}^{-1}\](24)¶\[\bigtriangleup e^2 \approx \frac{1}{K-1} \delta y_0^\intercal \mathrm{R}^{-1} \mathrm{Y}_0^a \mathrm{X}_{t|0}^{f^\intercal} \mathrm{C} (e_{t|0} + e_{t|-6})\]其中:\(\mathrm{Y}_0^a = \mathrm{H} \mathrm{X}_0^a\) 为分析扰动在观测空间的表示。
基于GRAPES-4DVar还处于开发中的现状以及将来系统升级的快捷,本项目将建立基于集合的FSO(Kalnay 等,2012)。具体实现表示如下:我们将应用一个时间序列的集合预报的扰动,来近似表示非线性模式的线性模式进而获得预报误差对初值的敏感梯度;以及观测集合的扰动观测来简化线性模式与增益矩阵M 的求解,进而实现观测对预报贡献的定量评估。
模块清单¶
EFSO由以下功能模块构成:
- 集合生成模块;
- 集合预报处理模块:对集合预报进行格式以及必要的变量转换;
- 观测资料处理模块:对观测进行格式转化及计算O-B等;
- 观测影响评估模块:EFSO核心模块,计算观测对预报的影响;
- 结果分析绘图模块;
二期模块优化¶
EFSO的并行化,提高计算效率
目前的算法考虑两种局地化(localization):
- 以观测点为中心的影响与观测点距离大小成反比的局地化;
- 类似Local ETKF的区域局地化。但观测的影响的信号中心随着时间向下游发展,二期工程将进一步发展考虑观测影响随时间变化的局地化方案。在此基础上比较不同方案的效果。
结合OSE/OSSE试验,进一步分析EFSO的有效性及局限性,为客户有效应用EFSO系统提供客观的参考依据。